





 Kiểm tra sản phẩm trước khi bán
Kiểm tra sản phẩm trước khi bán
 Tư vấn và hỗ trợ sử dụng
Tư vấn và hỗ trợ sử dụng
 Giao tận tay khách hàng
Giao tận tay khách hàng
 Hỗ trợ 24/7
Hỗ trợ 24/7
 Bảo hành trách nhiệm
Bảo hành trách nhiệm

 Khuyến mãi đặc biệt !!!
Khuyến mãi đặc biệt !!!
Cảm Biến Siêu Âm HC-SR04 là module đo khoảng cách sử dụng sóng siêu âm, được ứng dụng phổ biến trong các hệ thống robot tránh vật cản, xe tự hành, cảnh báo khoảng cách, đo mực nước và các dự án Arduino – ESP32 – IoT.
Với độ chính xác cao và cách sử dụng đơn giản, HC-SR04 là lựa chọn phù hợp cho cả người mới học lập trình lẫn kỹ sư chuyên nghiệp.
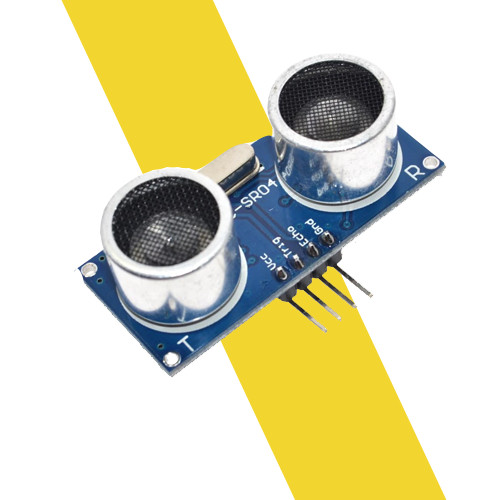
Cảm Biến Siêu Âm HC-SR04 Đo Khoảng Cách Cho Arduino
Cảm Biến Siêu Âm Ultrasonic HC-SR04
Cảm Biến Siêu Âm HC-SR04 Đo Khoảng Cách Cho Arduino
Bước 1: Truy cập website và lựa chọn sản phẩm cần mua
Bước 2: Click và sản phẩm muốn mua, màn hình hiển thị ra pop up với các lựa chọn sau
Nếu bạn muốn tiếp tục mua hàng: Bấm vào phần tiếp tục mua hàng để lựa chọn thêm sản phẩm vào giỏ hàng
Nếu bạn muốn xem giỏ hàng để cập nhật sản phẩm: Bấm vào xem giỏ hàng
Nếu bạn muốn đặt hàng và thanh toán cho sản phẩm này vui lòng bấm vào: Đặt hàng và thanh toán
Bước 3: Lựa chọn thông tin tài khoản thanh toán
Nếu bạn đã có tài khoản vui lòng nhập thông tin tên đăng nhập là email và mật khẩu vào mục đã có tài khoản trên hệ thống
Nếu bạn chưa có tài khoản và muốn đăng ký tài khoản vui lòng điền các thông tin cá nhân để tiếp tục đăng ký tài khoản. Khi có tài khoản bạn sẽ dễ dàng theo dõi được đơn hàng của mình
Nếu bạn muốn mua hàng mà không cần tài khoản vui lòng nhấp chuột vào mục đặt hàng không cần tài khoản
Bước 4: Điền các thông tin của bạn để nhận đơn hàng, lựa chọn hình thức thanh toán và vận chuyển cho đơn hàng của mình
Bước 5: Xem lại thông tin đặt hàng, điền chú thích và gửi đơn hàng
Sau khi nhận được đơn hàng bạn gửi chúng tôi sẽ liên hệ bằng cách gọi điện lại để xác nhận lại đơn hàng và địa chỉ của bạn.
Trân trọng cảm ơn.
Caka.vn Với mong muốn mang đến cho khách hàng những trải nghiệm mua sắm tốt nhất, các sản phẩm của Caka.vn khi gửi đến khách hàng luôn được đảm bảo là mới,chất lượng, đúng với thông tin mô tả và hình ảnh trên website.
Trong trường hợp sản phẩm thay thế tương đương sẽ được nhân viên gọi thông tin tới khách hàng.
A. Quy định đổi hàng - Sản phẩm được đổi 1 lần duy nhất trong vòng 02 ngày kể từ ngày nhận hàng.
- Sản phẩm đổi phải là sản phẩm chưa qua sử dụng
- Sản phẩm đổi phải có giá bằng hoặc cao hơn giá sản phẩm đã mua. Khách hàng sẽ không được hoàn lại tiền thừa nếu sản phẩm đổi có giá trị thấp hơn sản phẩm đã mua.
- Trường hợp sản phẩm được đặt trong thời gian diễn ra chương trình khuyến mãi, quý khách vui lòng đổi sản phẩm trong thời gian diễn ra chương trình để được áp dụng mức giá ưu đãi.
- Các sản phẩm ưu đãi giảm giá không áp dụng chính sách đổi hàng theo nhu cầu của khách hàng trừ trường hợp sản phẩm bị lỗi do nhà sản xuất. Do đó, khi nhận hàng quý khách vui lòng kiểm tra thật kỹ sản phẩm trước khi thanh toán.
B. Hướng dẫn đổi sản phẩm
1. Đối với khách hàng đặt mua sản phẩm tại website Caka.vn
Quý khách hàng khi có nhu cầu đổi sản phẩm có thể thực hiện theo 1 trong 2 cách sau đây:
Cách 1: Đổi sản phẩm trực tiếp tại cửa hàng Khách hàng đã mua sản phẩm tại website Caka.vn khi có nhu cầu đổi hàng có thể mang sản phẩm kèm theo vận đơn và hóa đơn đến đổi tại: Địa chỉ: 40/12 Lữ Gia-Phường 15-Quận 11-TP Hồ Chí Minh
Cách 2: Gửi đổi sản phẩm qua đường bưu điện
Đơn vị nhận : Linh Kiện Điện Tử Caka
SĐT: 096.363.1012
Địa chỉ: 40/12 Lữ Gia-Phường 15-Quận 11-TP Hồ Chí Minh
Sau khi nhận được sản phẩm chúng tôi sẽ tiến hàng kiểm tra chất lượng hàng hóa (quá trình này mất khoảng từ 2 - 3 ngày). Cửa hàng sẽ thông báo kết quả cho khách hàng qua điện thoại hoặc tin nhắn sau khi việc kiểm tra hoàn tất.









